产品特点
-
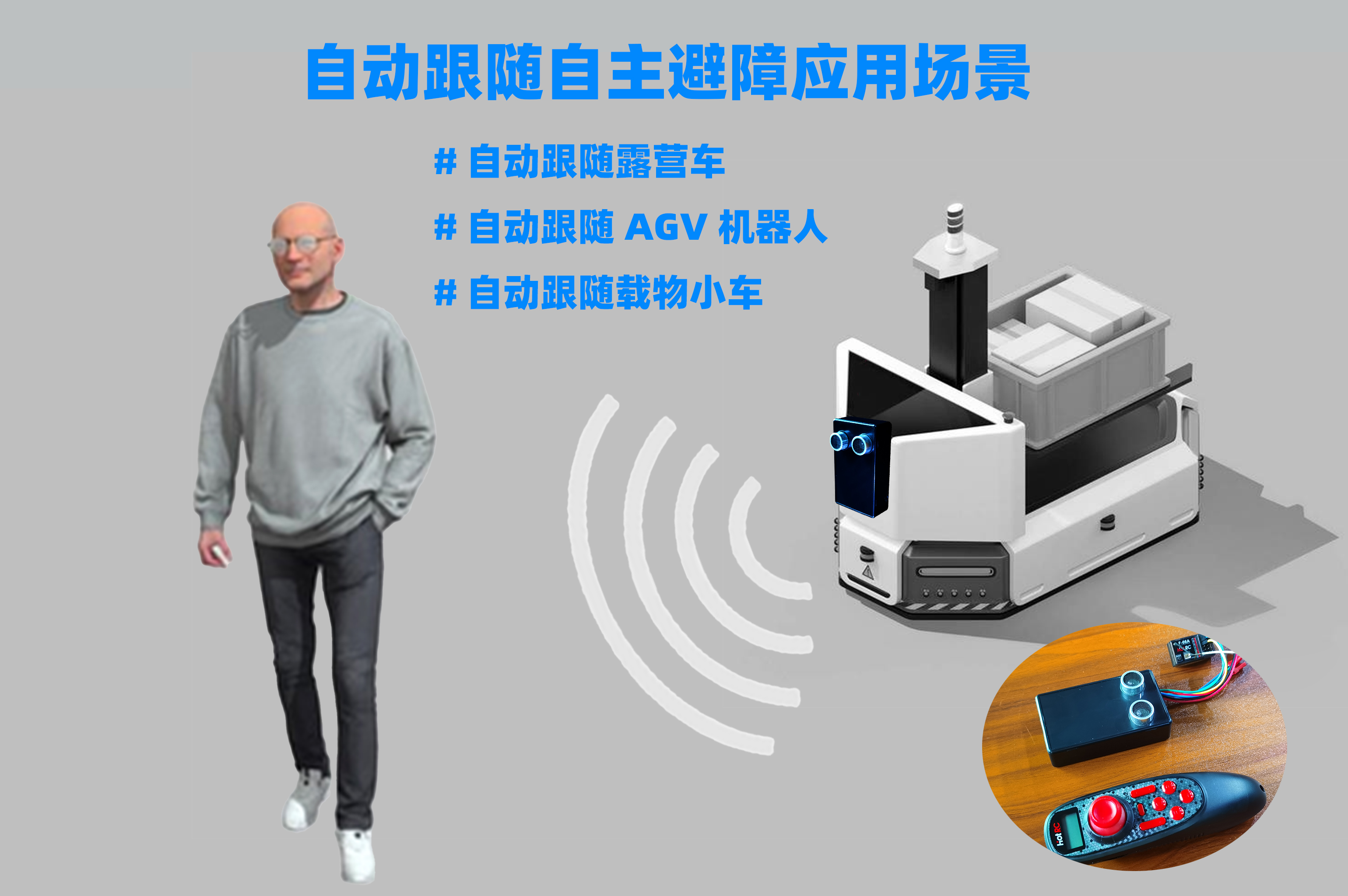
三模式自由切换
- 遥控模式:通过遥控器实现精准控制
- 自动跟随模式:智能识别目标并自动跟随
- 自主避障模式:自动检测并避开障碍物
-
全参数可配置
- 所有关键参数均可通过配置界面自由调配
- 参数自动保存,断电不丢失
- 直观的参数配置界面
-
智能避障系统
- 前方超声波探测
- 实时距离检测
- 智能避障策略
技术参数
- 工作电压:7V - 9V
- 通信方式:2.4g 和 WiFi
- 控制距离:遥控模式 ≤ 100米,跟随模式 ≤ 10米
- 避障距离:0.1 - 1米 可调
- 跟随距离:1 - 10米 可调
使用说明
- 接通电源开机
- 接通电源,等待系统初始化
- LED指示灯常亮表示系统就绪
- 模式切换
- 通过遥控器第三通道进行模式切换(跟随遇到危险情况也可以切换模式急停)
- 不同模式下LED指示灯有不同的闪烁方式
- 配置模式
- 按住配置按钮不放同时开机
- 连接wifi网络”ONZHI跟随机器人“热点(密码12345678)
- 浏览器访问配置页面IP:192.168.4.1进入配置页面
- 根据需求调整参数或者恢复默认参数
安装说明
- 主机安装
- 将主机安装在小车车头的正中间位置
- 确保跟随模块或超声波传感器朝向正前方,无遮挡
- 保持传感器水平,避免倾斜
- 连接线缆
- 根据接口标识连接电源线和信号线
- 确保线连接牢固,无松动,不互相短路
注意事项
- 首次使用建议详细阅读完整说明
- 请勿在超出技术参数范围的环境下使用
- 避免在潮湿或雨水环境中使用传感器
- 参数修改后需点击保存按钮
- 如果参数设置不当导致异常,可使用恢复默认值功能
- 定期检查线缆连接和部件固定情况
故障排除
- 小车不响应遥控
- 检查遥控器电池电量
- 确认遥控器与接收机是否成功对频
- 检查遥控接收机与主控板的连接线是否松动或接反
- 检查主控板供电是否正常(电压、电流)
- 避障功能异常
- 检查超声波传感器前方是否有污渍或遮挡物
- 确认避障距离参数设置是否合理
- 检查传感器接线是否正确牢固
- 尝试在开阔地带测试,排除环境干扰
- 跟随功能失效
- 检查电机接线线序是否正确(通过调整电机线序改变电机方向)
- 确认目标是否在有效跟随距离和角度内
- 检查跟随模块是否装在车头中间位置
- 确保跟随模块没有装反,朝向正前方
- 检查相关跟随参数设置(如跟随距离、灵敏度等)
